Localization & AMCL
Localization이란?

제타봇의 Rviz를 띄우고 2D Pose Estimate를 누르고 방향을 조절하면 로봇의 레이저 값과 맵의 공간이 어느정도 일치하는게 보일것입니다.
이렇게 로봇이 어느 위치에 있는지를 추정하는 과정 Localization입니다.
AMCL(Adaptive Monte Carlo Localization)
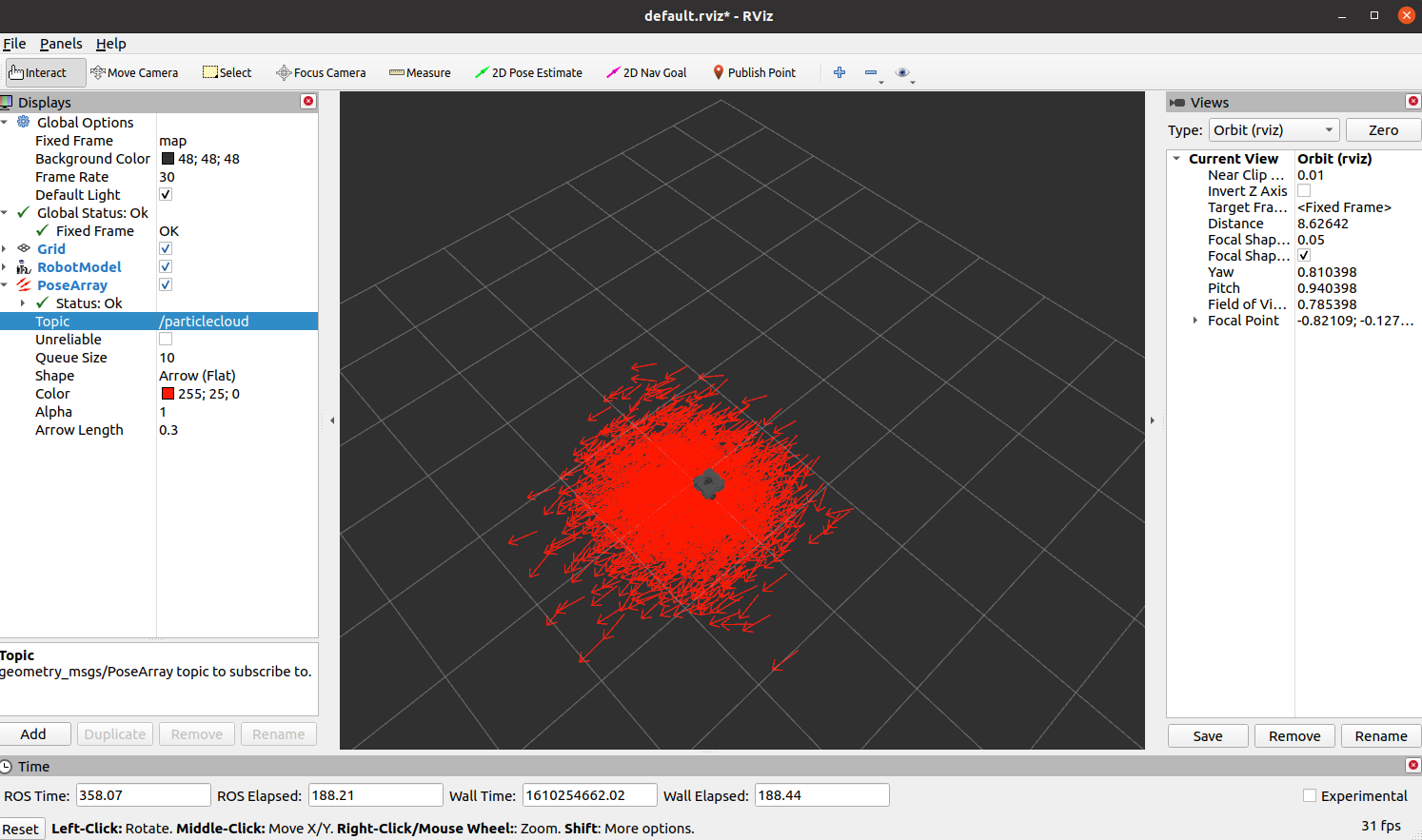
AMCL**이란 위의 **Localization**을 하기 위한 전반적인 알고리즘을 일컫는 말입니다. | 위의 그림에서 빨간색 화살표들이 보일텐데 이러한 **경로 예측들을 파티클(Particle)이라고 부릅니다. 그리고 로봇을 움직이면 움직일수록 이러한 파티클들이 로봇주위에 가깝게 뭉쳐지는 현상을 볼 수 있습니다. 왜냐하면 움직일수록 위치가 어디인지 확실하게 알기 때문입니다. 이때 사용되는 위치추적 알고리즘을 우리는 AMCL이라고 부릅니다. | | 다음은 AMCL의 성능을 좌지우지하는 Parameter에 대한 설명입니다.
min_particles (default: 100): 파티클 필터에서 사용할 최소 파티클 수 입니다.
max_particles (default: 5000): 파티클 필터에서 사용할 최대 파티클 수 입니다.
kld_err (default: 0.01): 실제 분포와 추정 분포 사이의 최대 오차를 설정합니다.
update_min_d (default: 0.2): 필터 업데이트를 위해 로봇이 움직여야 할 최소한의 linear distance입니다(미터 단위).
update_min_a (default: π/6.0): 필터 업데이트를 위해 로봇이 움직여야 할 최소한의 angular distance입니다(라디안 단위).
resample_interval (default: 2): 리샘플링 되기 이전에 파티클 필터를 업데이트하는 횟수를 정합니다.
transform_tolerance (default: 0.1): 이 변환이 publish된 후 언제까지 유효한지를 나타내는 시간을 정합니다(초 단위).
gui_publish_rate (default: -1.0): 시각화를 위해 각각의 스캔과 경로가 표시될 시간을 정합니다(헤르츠 단위) -1.0이면 해당 기능을 비활성화 합니다.