ROS Service Server
02_01_ros_service_server.ipynb
- 셀 실행시키기Ctrl + Enter
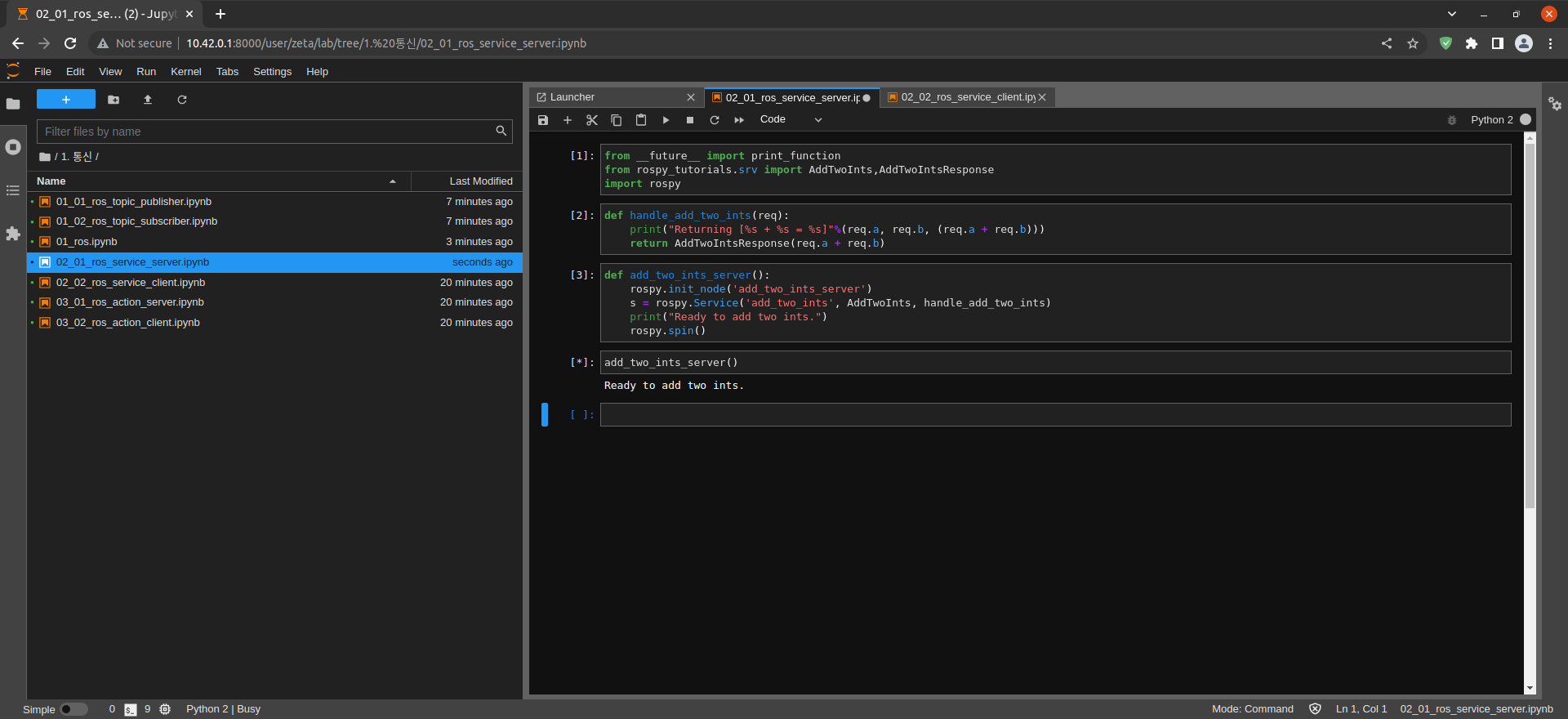
from __future__ import print_function
from rospy_tutorials.srv import AddTwoInts,AddTwoIntsResponse
import rospy
Python3 호환을 위한__future__ 모듈에서 print_function 가져오기
rospy_tutorials.srv 모듈에서 AddTwoInts, AddTwoIntsResponse 가져오기
rospy 모듈 가져오기
def handle_add_two_ints(req):
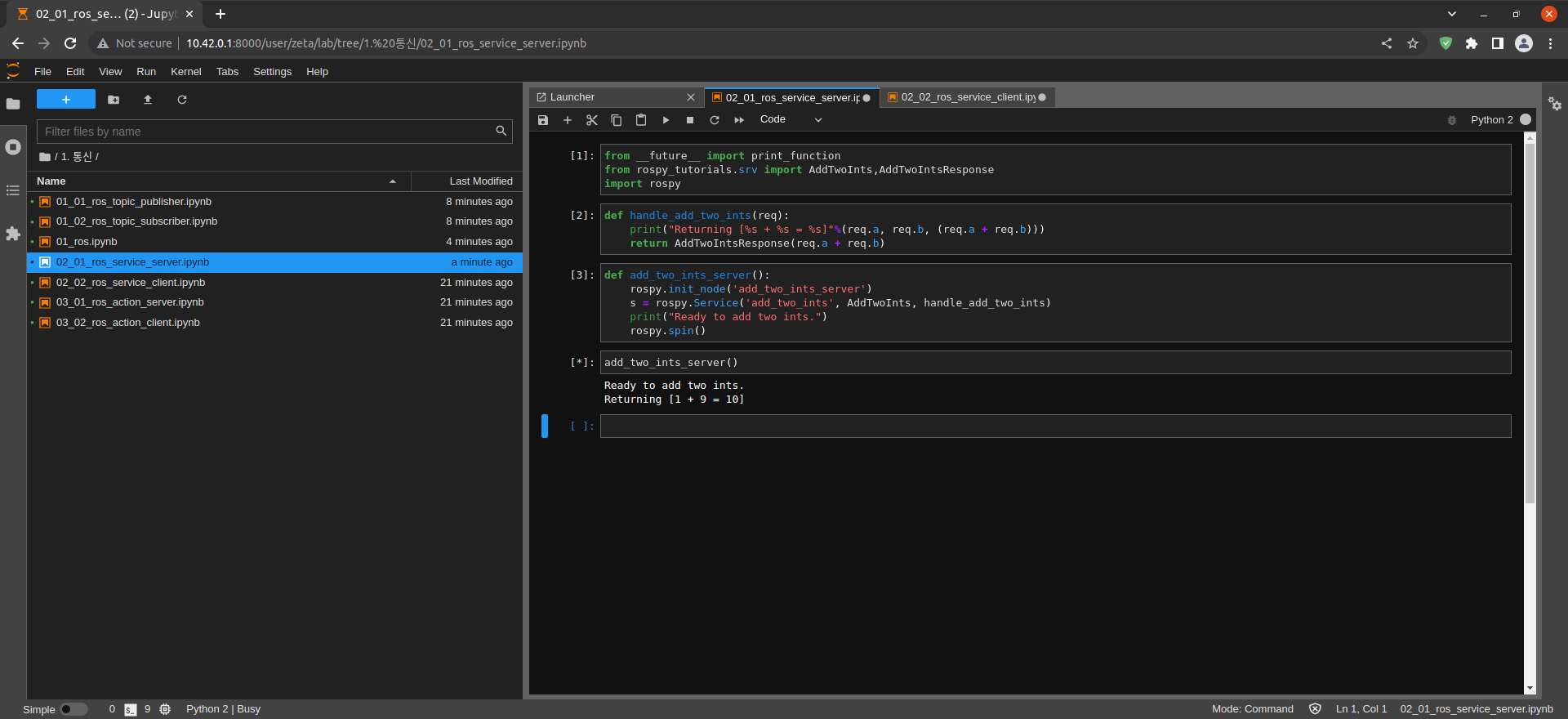
print("Returning [%s + %s = %s]"%(req.a, req.b, (req.a + req.b)))
return AddTwoIntsResponse(req.a + req.b)
handle_add_two_ints() 함수 생성
req.a, req.b, req.a + req.b 출력
AddTwoIntsResponse에 req.a + req.b 인스턴스 반환
def add_two_ints_server():
rospy.init_node('add_two_ints_server')
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints)
print("Ready to add two ints.")
rospy.spin()
add_two_ints_server() 함수 생성
add_two_ints_server Node 생성
add_two_ints Service 생성
add_two_ints_server()
add_two_ints_server() 함수 실행