스피커
01_sound.ipynb
- 셀 실행시키기Ctrl + Enter
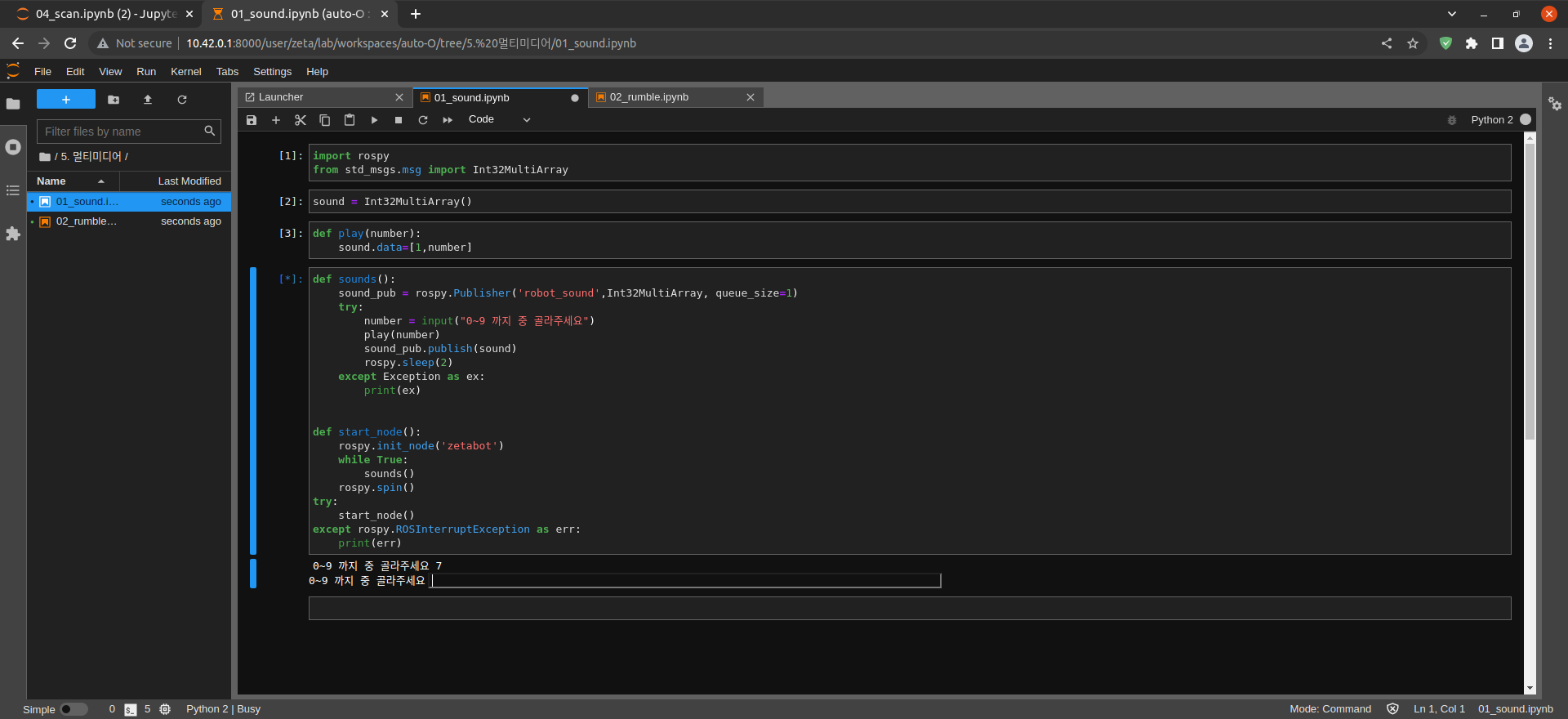
import rospy
from std_msgs.msg import Int32MultiArray
rospy 모듈 가져오기
std_msgs.msg 모듈에서 Int32MultiArray 가져오기
sound = Int32MultiArray()
sound 변수를 Int32MultiArray() Message Type으로 지정
def play(number):
sound.data=[1,number]
play(number) 함수 생성
sound Message의 data를 [1,number] 형식으로 지정
def sounds():
sound_pub = rospy.Publisher('robot_sound',Int32MultiArray, queue_size=1)
try:
number = input("0~9 까지 중 골라주세요")
play(number)
sound_pub.publish(sound)
rospy.sleep(2)
except Exception as ex:
print(ex)
def start_node():
rospy.init_node('zetabot')
while True:
sounds()
rospy.spin()
try:
start_node()
except rospy.ROSInterruptException as err:
print(err)
sounds() 함수 생성
robot_sound Topic Publisher 생성
number 변수에 사용자 입력 받기
play(number) 함수 실행
sound Message Publish
2초간 시간 지연 및 예외처리
start_node() 함수 생성
zetabot Node 생성
sounds() 함수 실행
start_node() 함수 실행 및 예외처리