그리퍼 제어하기
05_08_grip.ipynb
- 셀 실행시키기Ctrl + Enter
#!/usr/bin/env python3
#coding=utf-8
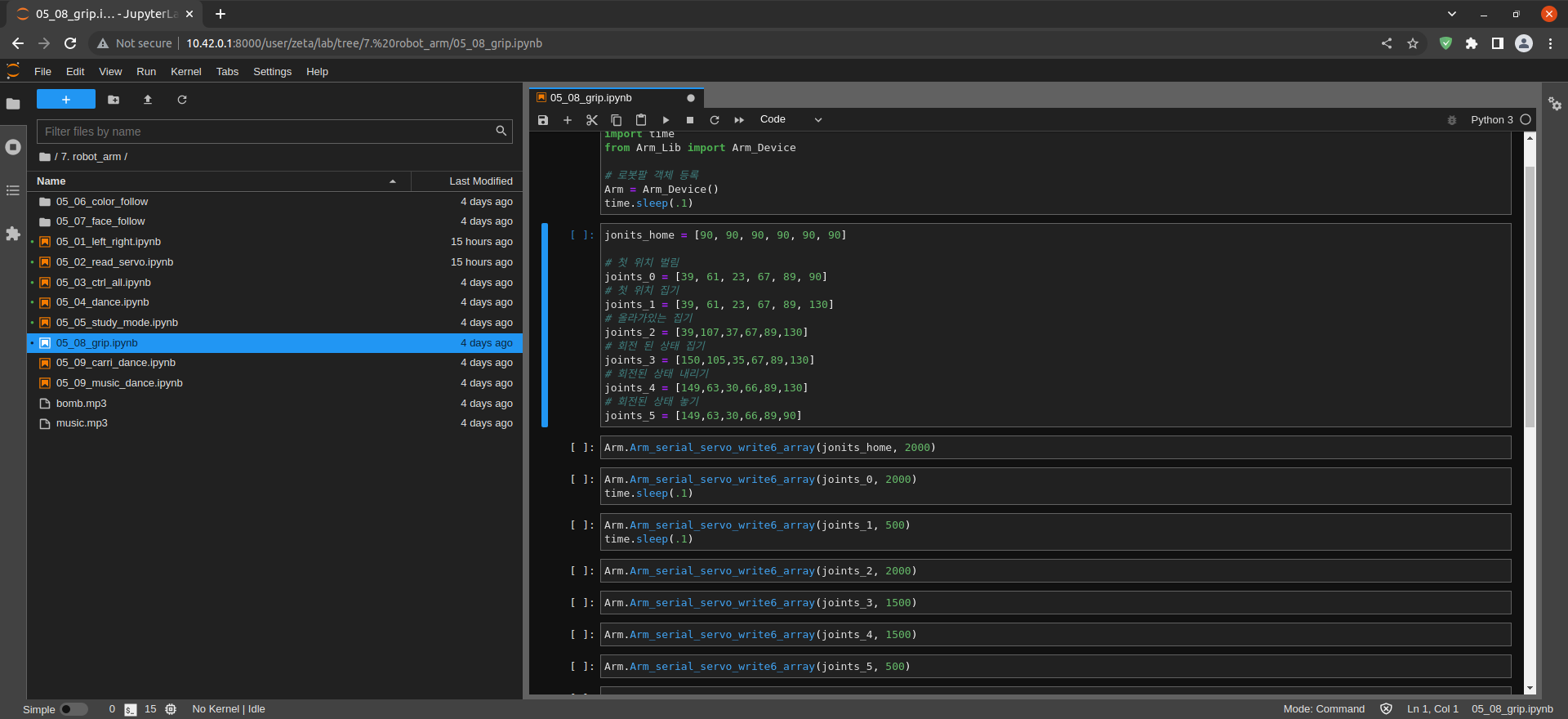
import time
from Arm_Lib import Arm_Device
# 로봇팔 객체 등록
Arm = Arm_Device()
time.sleep(.1)
Arm_Lib 모듈 불러오기 및 로봇팔 객체 등록
jonits_home = [90, 90, 90, 90, 90, 90]
# 첫 위치 벌림
joints_0 = [39, 61, 23, 67, 89, 90]
# 첫 위치 집기
joints_1 = [39, 61, 23, 67, 89, 130]
# 올라가있는 집기
joints_2 = [39,107,37,67,89,130]
# 회전 된 상태 집기
joints_3 = [150,105,35,67,89,130]
# 회전된 상태 내리기
joints_4 = [149,63,30,66,89,130]
# 회전된 상태 놓기
joints_5 = [149,63,30,66,89,90]
list = [1번 모터, 2번 모터, 3번 모터, 4번 모터, 5번 모터, 6번 모터]
Arm.Arm_serial_servo_write6_array(jonits_home, 2000)
Arm_serial_servo_write6_array(list, 시간)
Arm_serial_servo_write6_array(list, 시간)
Arm.Arm_serial_servo_write6_array(joints_1, 500)
time.sleep(.1)
Arm.Arm_serial_servo_write6_array(joints_2, 2000)
Arm.Arm_serial_servo_write6_array(joints_3, 1500)
Arm.Arm_serial_servo_write6_array(joints_4, 1500)
Arm.Arm_serial_servo_write6_array(joints_5, 500)
서보모터와 그리퍼 제어를 통한 Pick and Place
del Arm # Release DOFBOT object
로봇팔 객체 제거