서보모터 제어하기
05_03_ctrl_all.ipynb
- 셀 실행시키기Ctrl + Enter
#!/usr/bin/env python3
#coding=utf-8
import time
from Arm_Lib import Arm_Device
# 로봇팔 객체 등록
Arm = Arm_Device()
time.sleep(.1)
Arm_Lib 모듈 불러오기 및 로봇팔 객체 등록
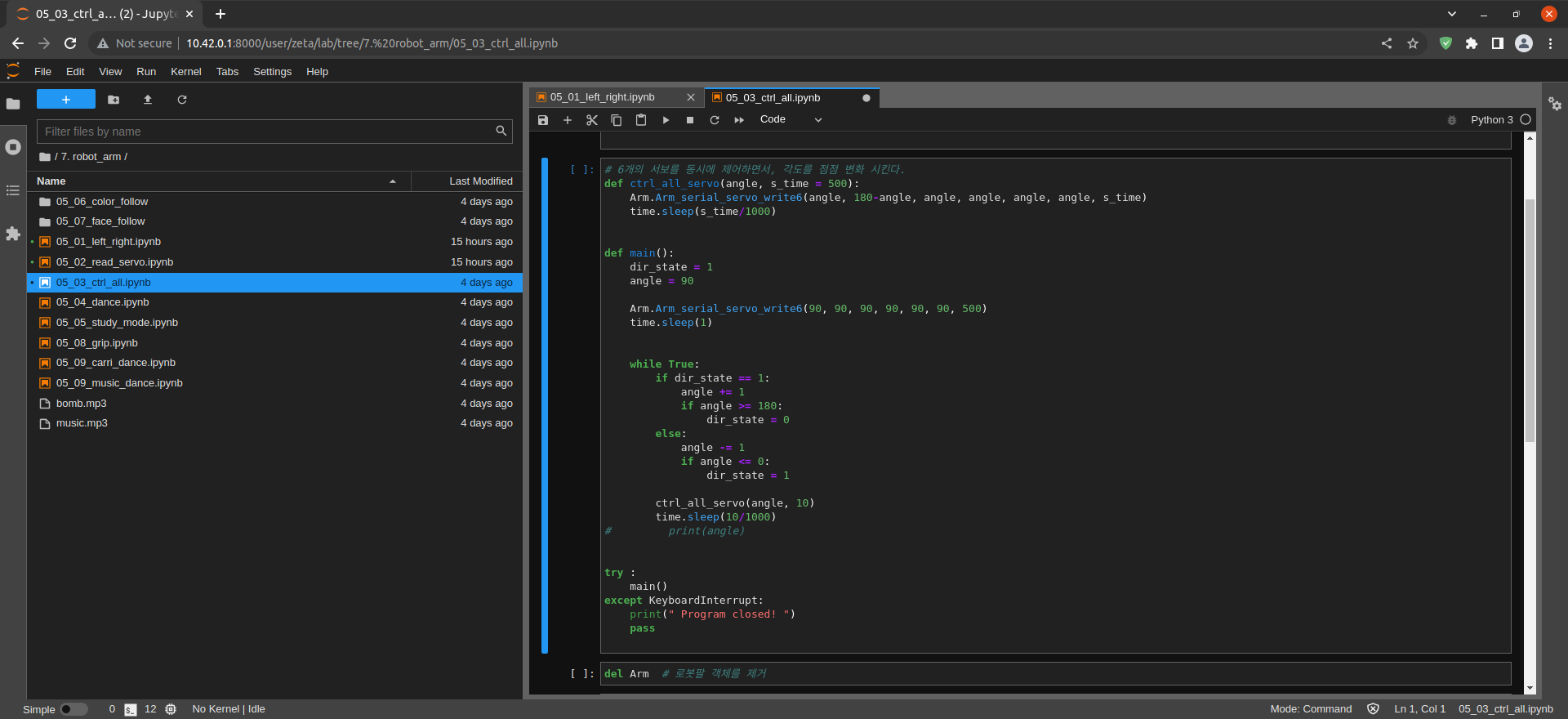
# 6개의 서보를 동시에 제어하면서, 각도를 점점 변화 시킨다.
def ctrl_all_servo(angle, s_time = 500):
Arm.Arm_serial_servo_write6(angle, 180-angle, angle, angle, angle, angle, s_time)
time.sleep(s_time/1000)
def main():
dir_state = 1
angle = 90
Arm.Arm_serial_servo_write6(90, 90, 90, 90, 90, 90, 500)
time.sleep(1)
while True:
if dir_state == 1:
angle += 1
if angle >= 180:
dir_state = 0
else:
angle -= 1
if angle <= 0:
dir_state = 1
ctrl_all_servo(angle, 10)
time.sleep(10/1000)
# print(angle)
try :
main()
except KeyboardInterrupt:
print(" Program closed! ")
pass
Arm_serial_servo_write(모터 번호, 각도, 시간)
while문을 이용해 모든 서보모터 각도를 1˚씩 증감
del Arm # 로봇팔 객체 제거
로봇팔 객체 제거