Navigation setting for Zetabot
제타봇 네비게이션 및 조작 설명입니다.
Mapping 실전
매핑에 대한 설명입니다.
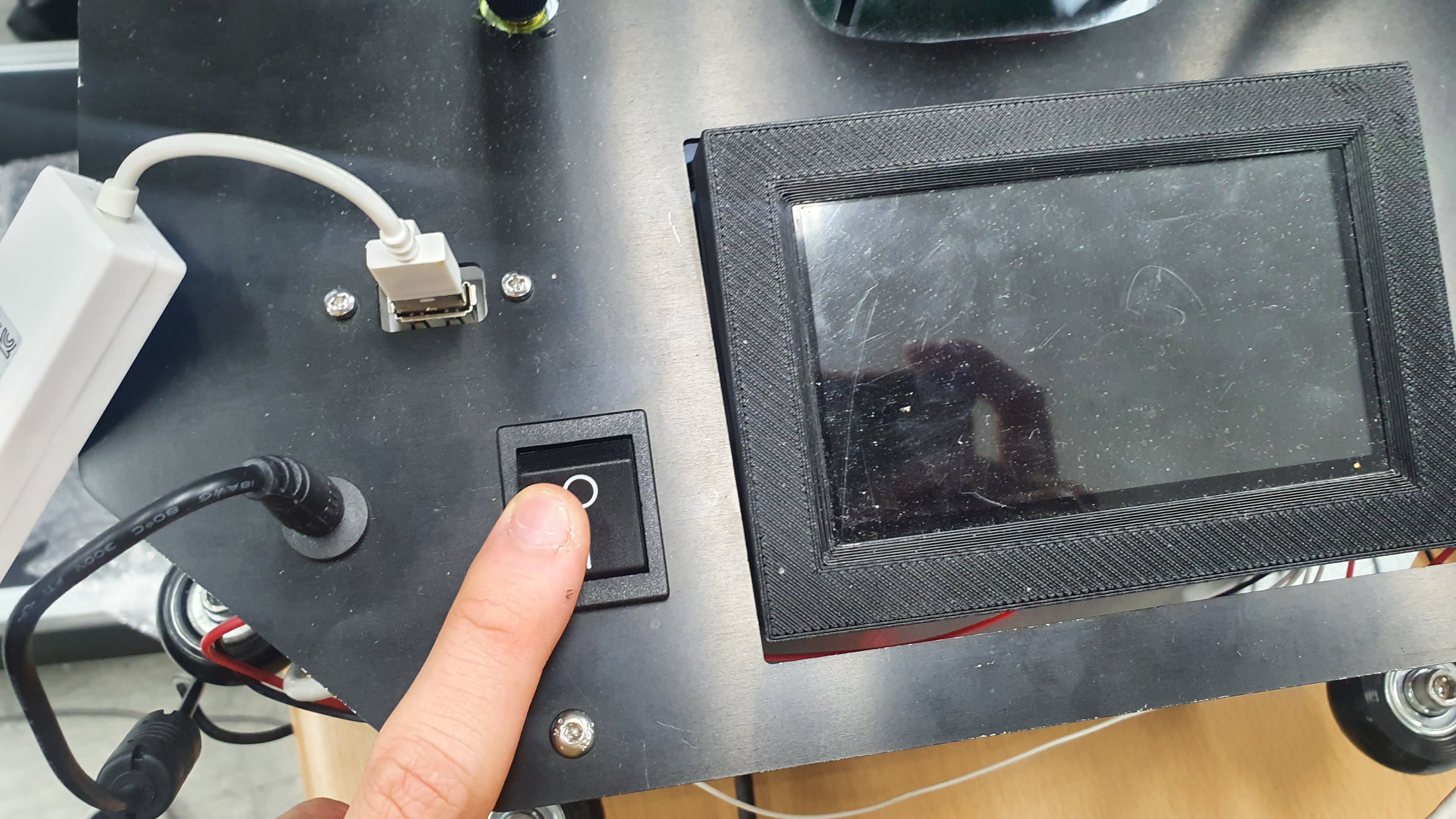
제타봇의 전원 스위치를 켭니다.
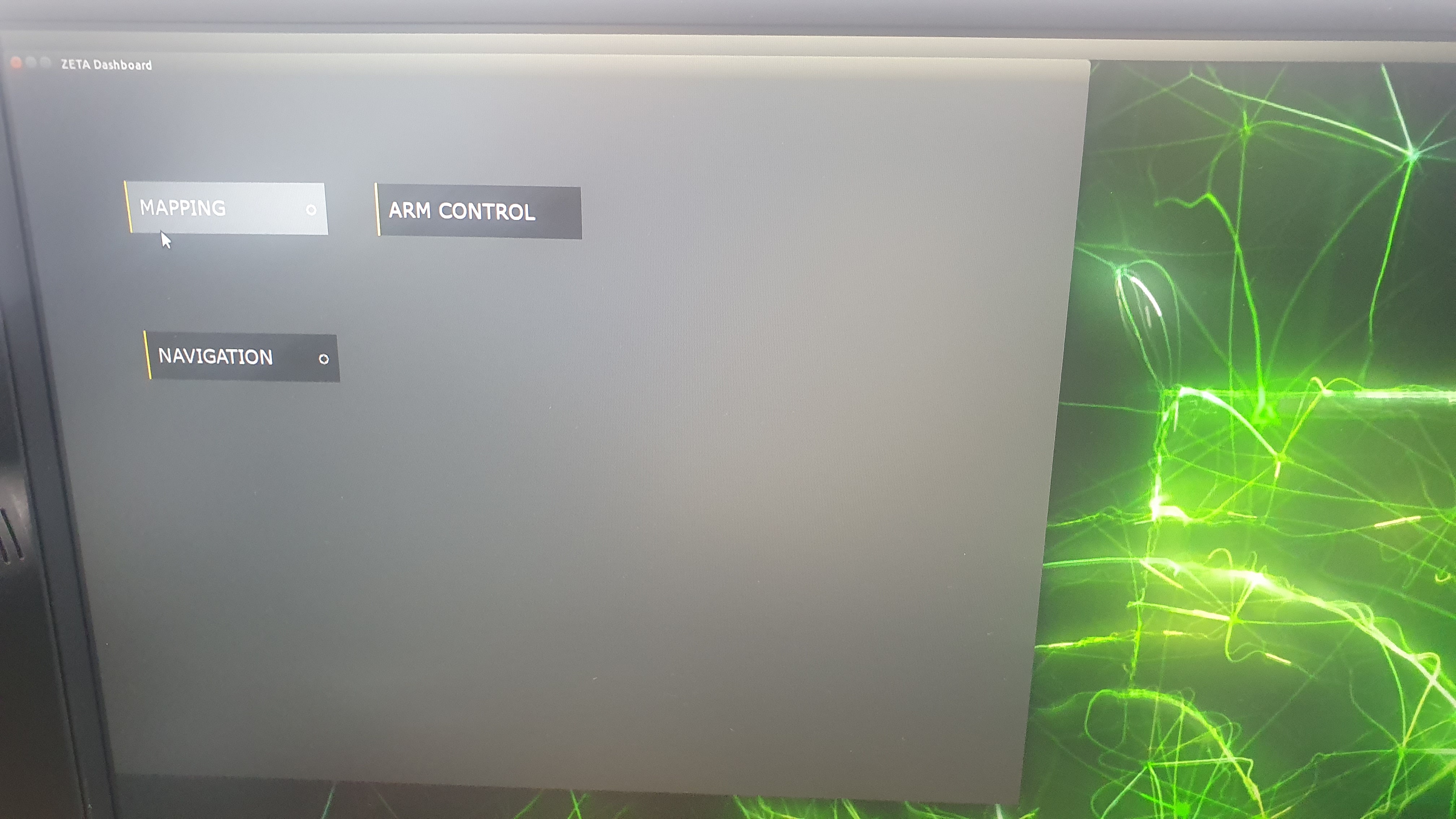
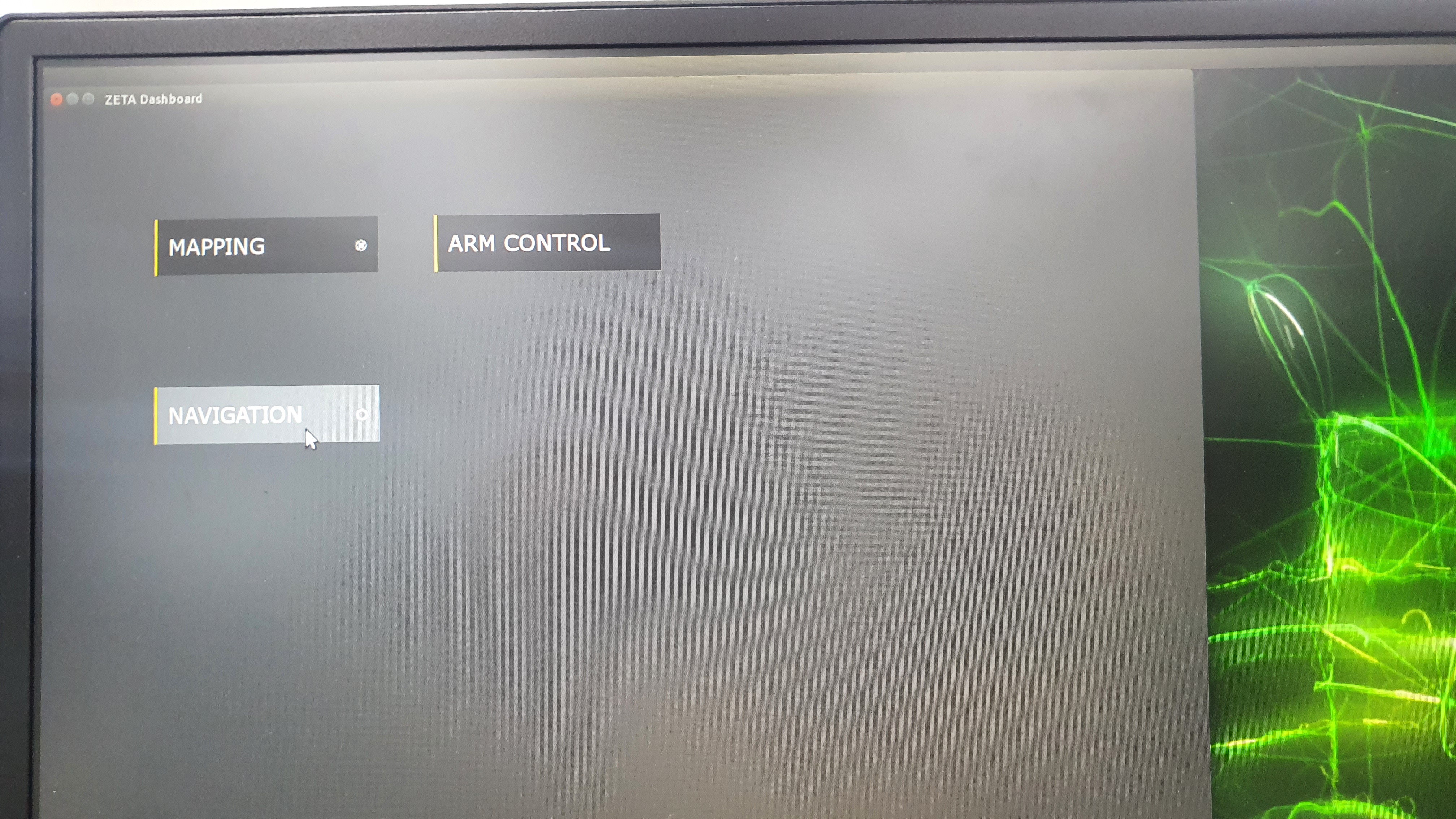
Mapping 버튼을 클릭합니다.
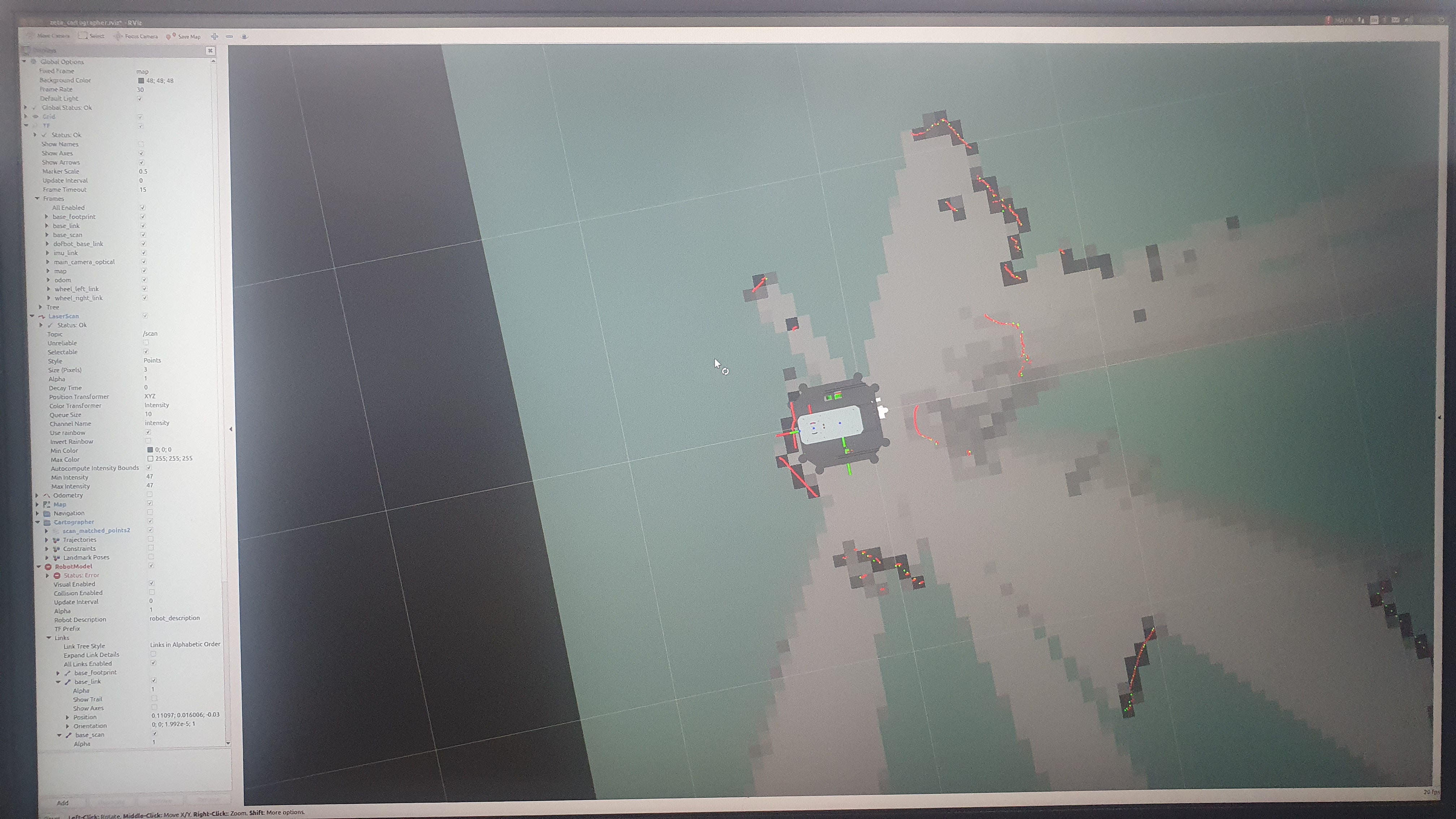
제타봇을 움직여서 매핑을 시도합니다. 빨간색으로 측정되어있는 부분이 라이다에서 측정된 데이터들입니다. 검은색은 SLAM 알고리즘을 통하여 라이다가 측정한 벽입니다.
제타봇 조이스틱 조작
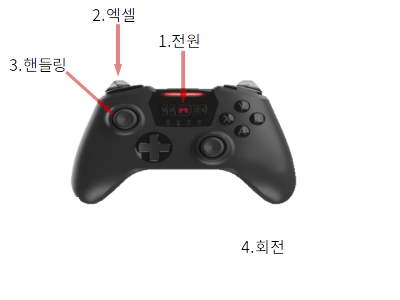
전원을 켭니다.
조이스틱에 진동이 오면 제타봇과 조이스틱이 연결되었다는 신호입니다.
엑셀(LB)버튼을 누르고 왼쪽 조이스틱을 사용하여 핸들링을 합시
LT버튼을 누르고 오른쪽 조이스틱을 사용하여 제타봇을 회전시킵시다.
Navigation 실전
Mapping이 끝났다면 Navigation 버튼을 클릭합니다.
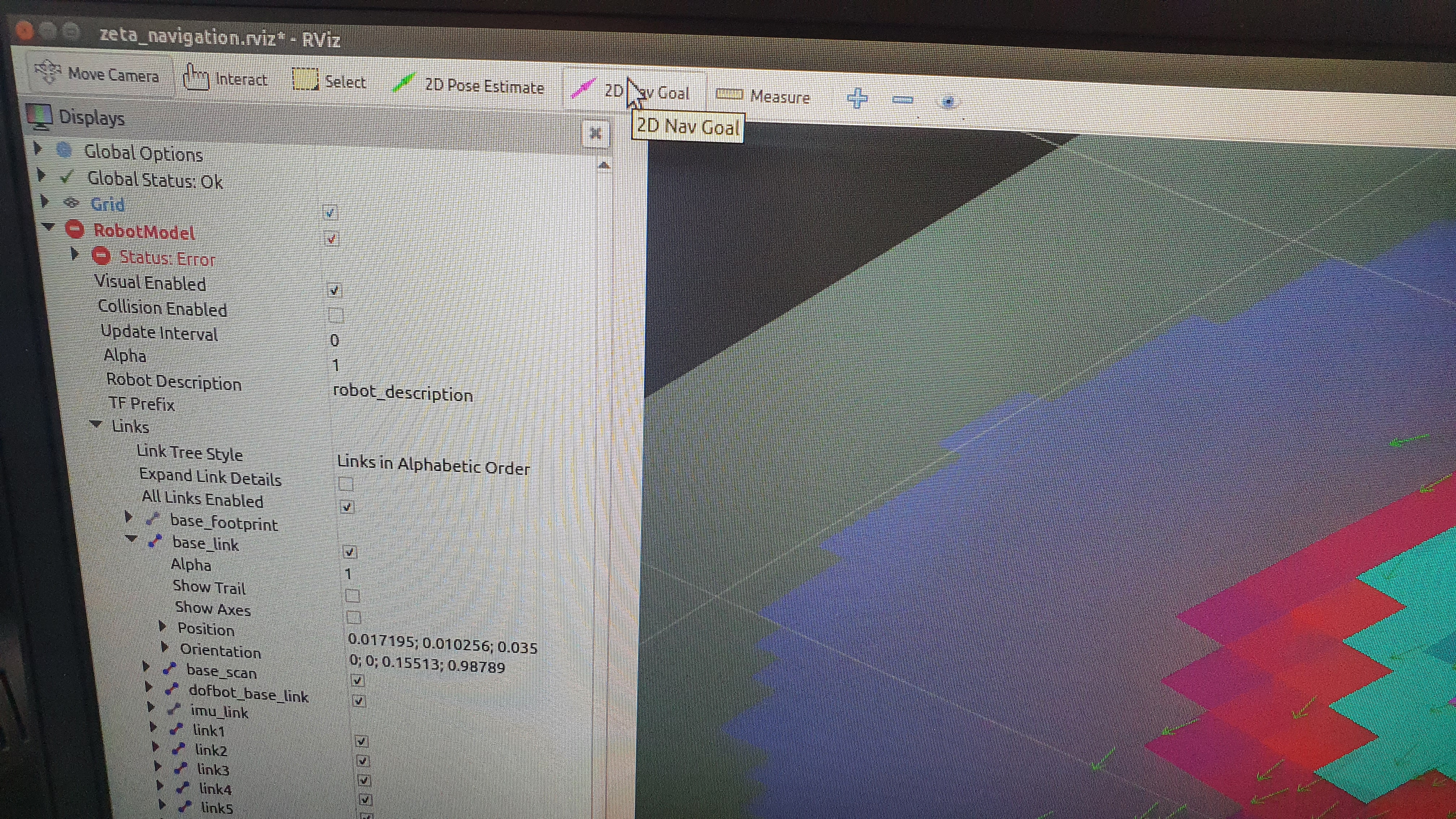
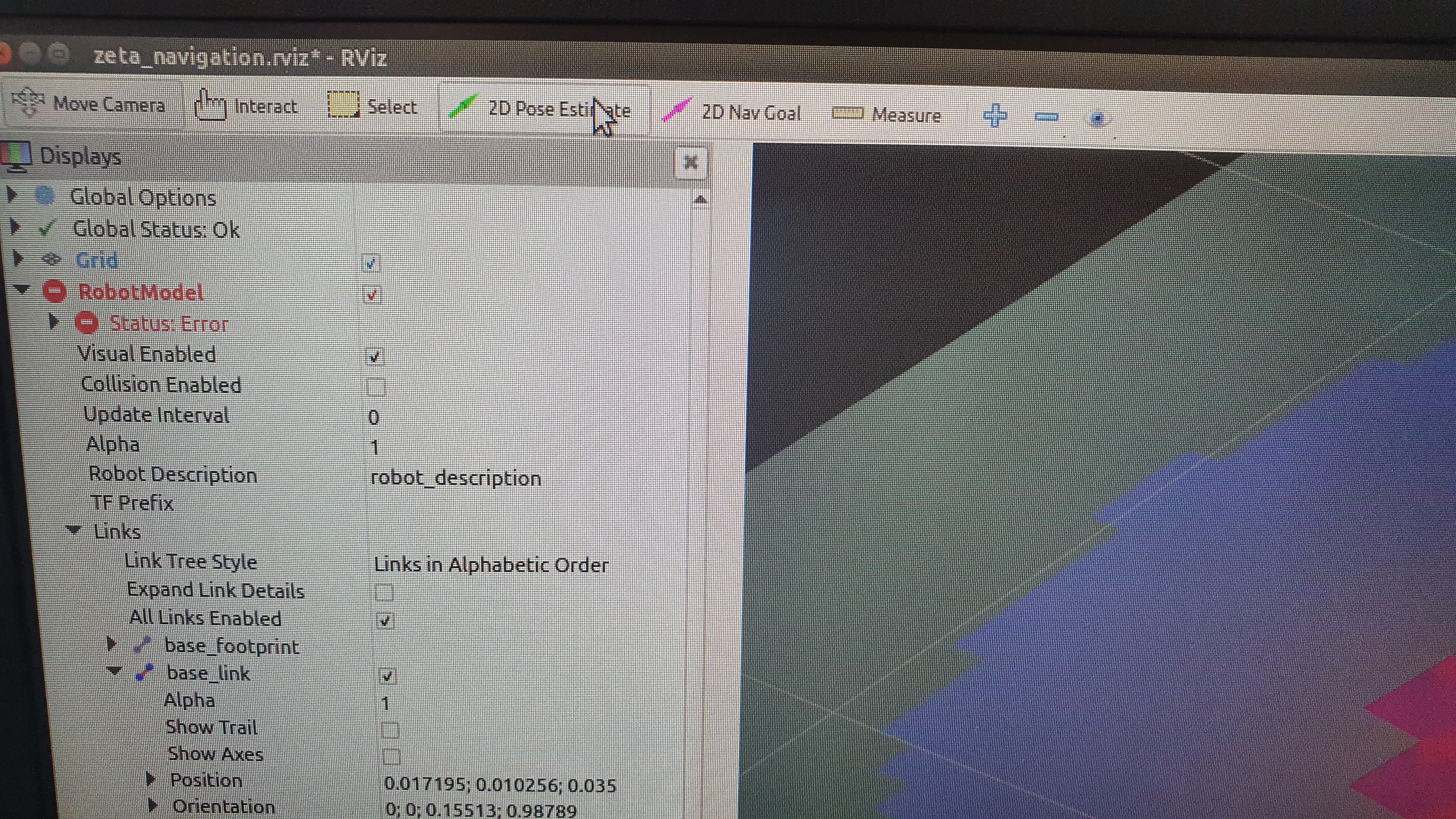
2D Pose Estimate로 로컬라이제이션을 실행합니다.
이때 라이다상에서 초록색으로 측정이 된 장애물과 맵상의 장애물이 어느정도 일치하는게 좋습니다.
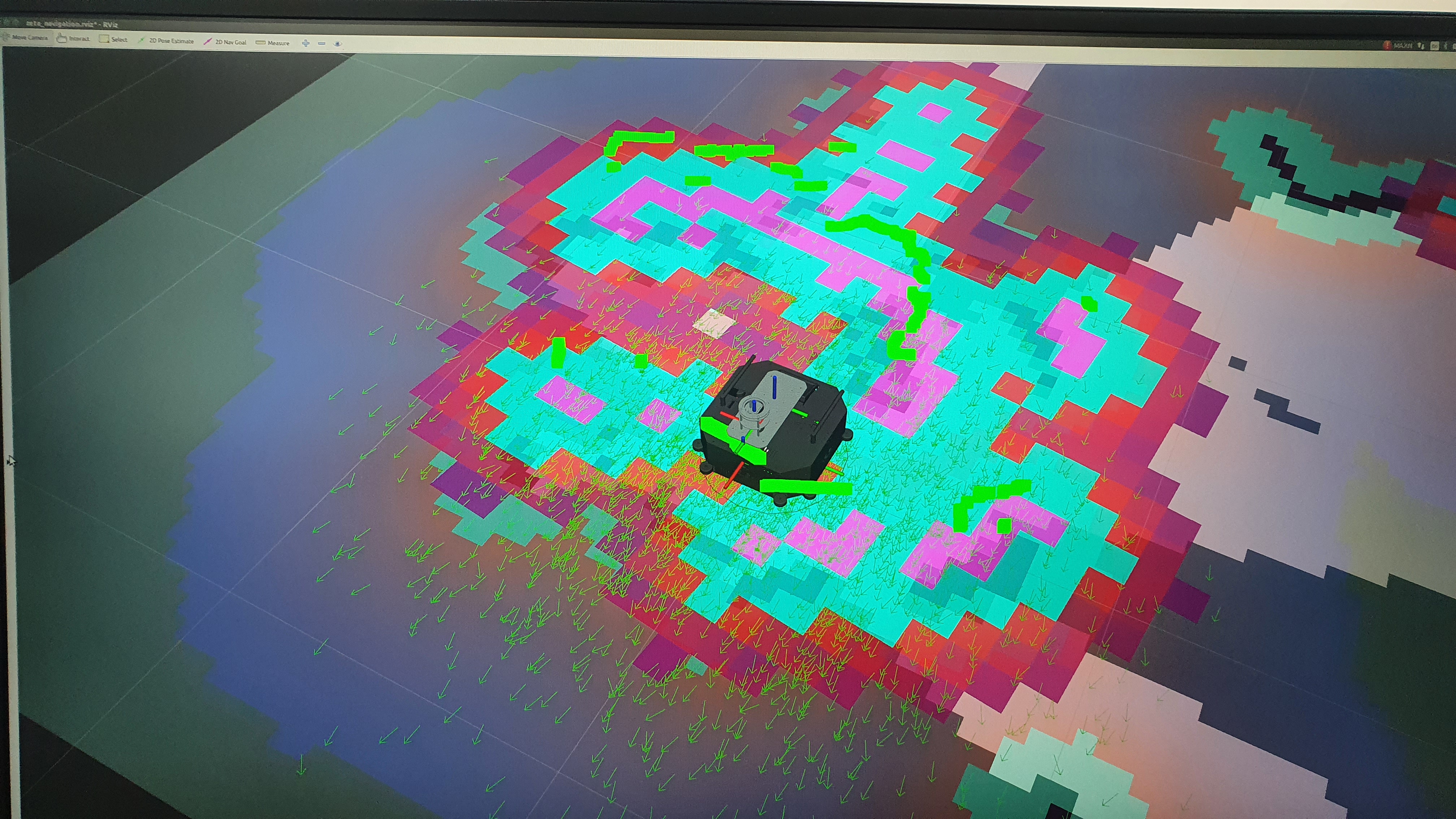
2D Nav Goal을 클릭하여 목표를 정하게 되면 자율주행 세팅은 끝이 납니다.