ROS Topic Publisher
01_01_ros_topic_publisher.ipynb
- 셀 실행시키기Ctrl + Enter
import rospy
from std_msgs.msg import String
rospy 모듈 가져오기
std_msgs.msg 모듈에서 String 가져오기
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
talker() 함수 생성
talker Node 및 chatter Topic 생성
“hello world” + ROS Timestamp Message를 Publish
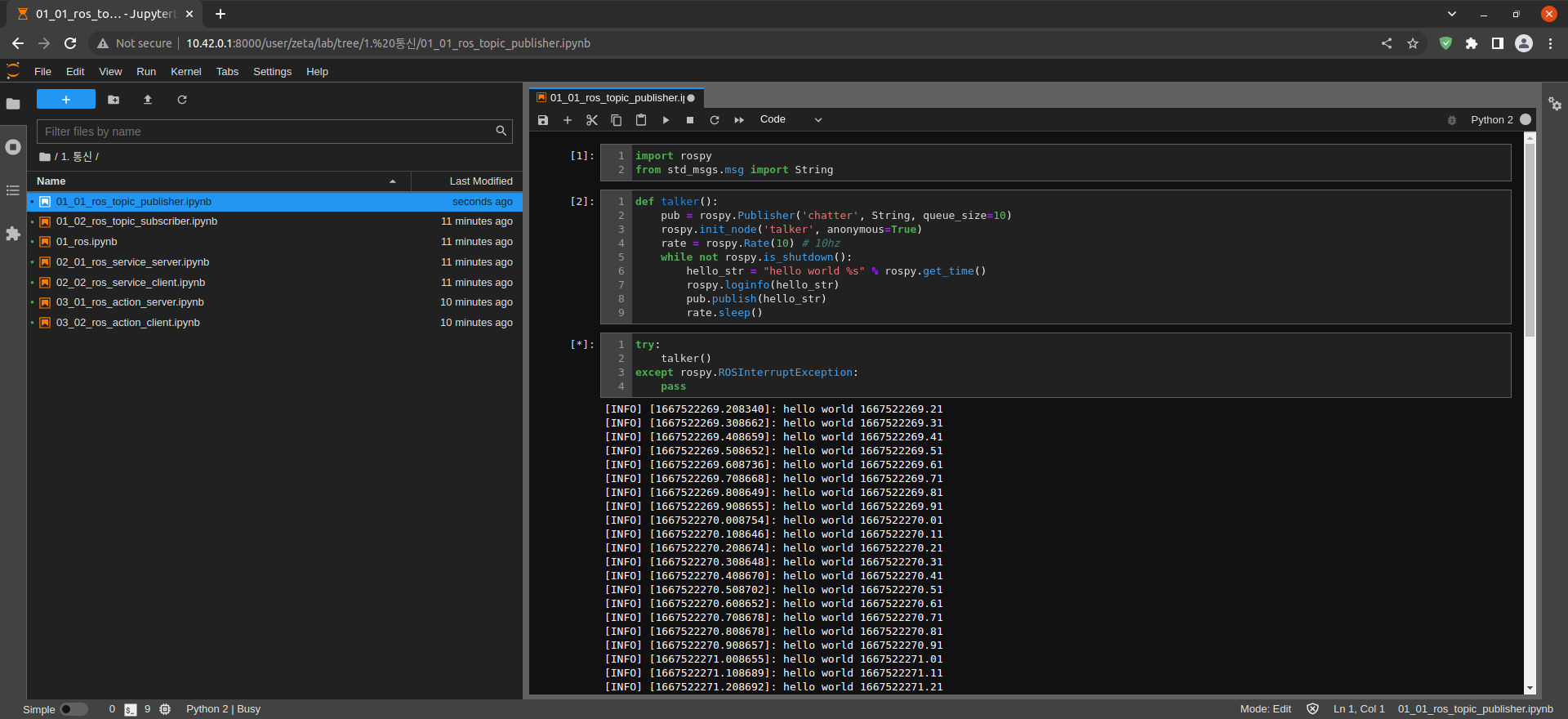
try:
talker()
except rospy.ROSInterruptException:
pass
talker() 함수 실행 및 예외처리