ROS Action Client
03_02_ros_action_client.ipynb
- 셀 실행시키기Ctrl + Enter
import rospy
from __future__ import print_function
import actionlib
import actionlib_tutorials.msg
rospy 모듈 가져오기
Python3 호환을 위한__future__ 모듈에서 print_function 가져오기
actionlib 및 actionlib_tutorials.msg 모듈 가져오기
def fibonacci_client():
# SimpleActionClient를 생성, action의 타입을 전달
client = actionlib.SimpleActionClient('fibonacci', actionlib_tutorials.msg.FibonacciAction)
# action server를 확인하고 시작 될 때 까지 기다림
# 목표를 받음
client.wait_for_server()
# action 서버에 보낼 목표를 생성
goal = actionlib_tutorials.msg.FibonacciGoal(order=20)
# action 서버에 목표를 보냄
client.send_goal(goal)
#서버가 action을 수행할 때 까지 기다림
client.wait_for_result()
# action의 결과를 출력
return client.get_result() # A FibonacciResult
fibonacci_client() 함수 생성
try:
# SimpleActionClient가 ROS를 통해 publish 및 subscribe 할 수 있도록 Rospy 노드를 초기화 및 생성한다.
rospy.init_node('fibonacci_client_py')
result = fibonacci_client()
print("Result:", ', '.join([str(n) for n in result.sequence]))
except rospy.ROSInterruptException:
print("program interrupted before completion", file=sys.stderr)
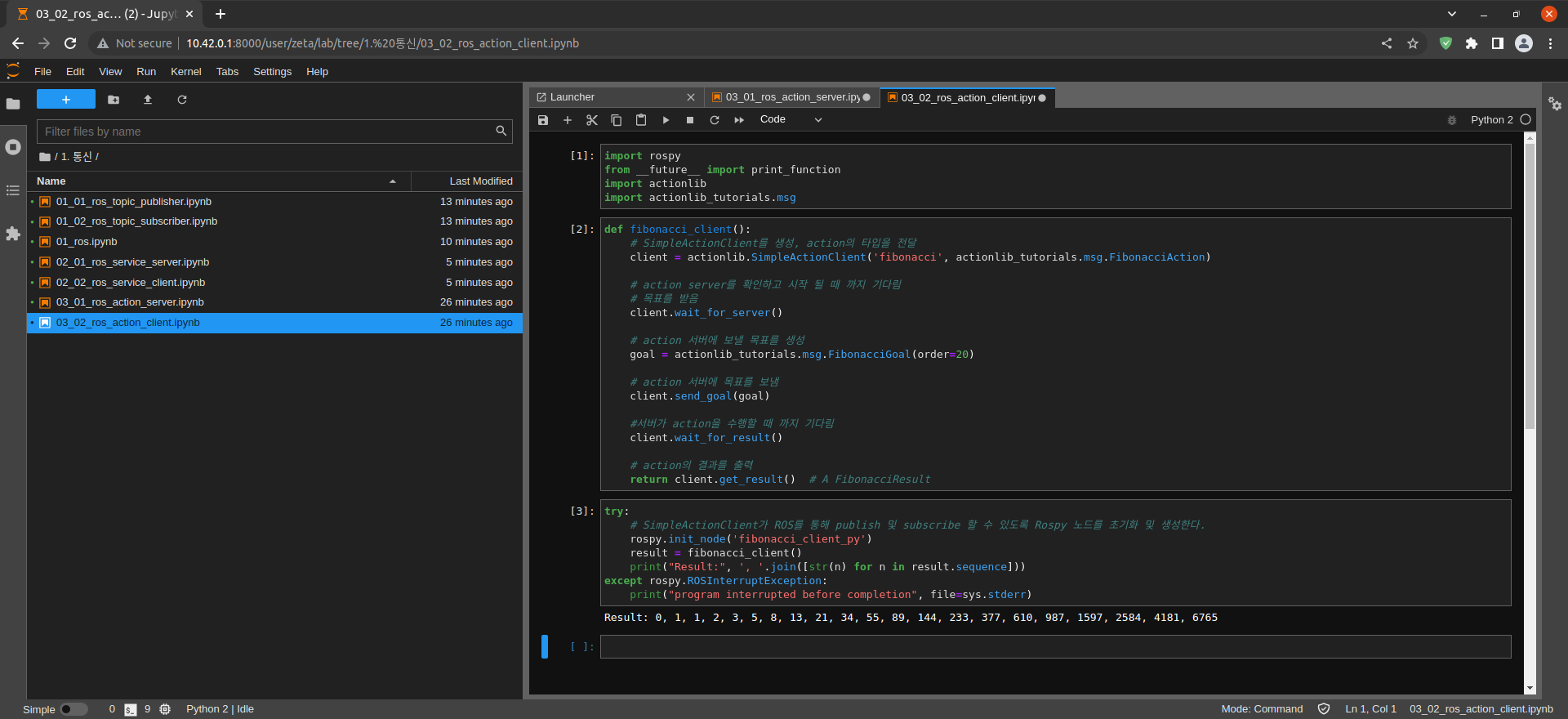
fibonacci_client_py Action Node 생성
연산값 출력